


Note
Click here to download the full example code
Language Modeling with nn.Transformer and torchtext¶
This is a tutorial on training a model to predict the next word in a sequence using the nn.Transformer module.
The PyTorch 1.2 release includes a standard transformer module based on the
paper Attention is All You Need.
Compared to Recurrent Neural Networks (RNNs), the transformer model has proven
to be superior in quality for many sequence-to-sequence tasks while being more
parallelizable. The nn.Transformer module relies entirely on an attention
mechanism (implemented as
nn.MultiheadAttention)
to draw global dependencies between input and output. The nn.Transformer
module is highly modularized such that a single component (e.g.,
nn.TransformerEncoder)
can be easily adapted/composed.
Define the model¶
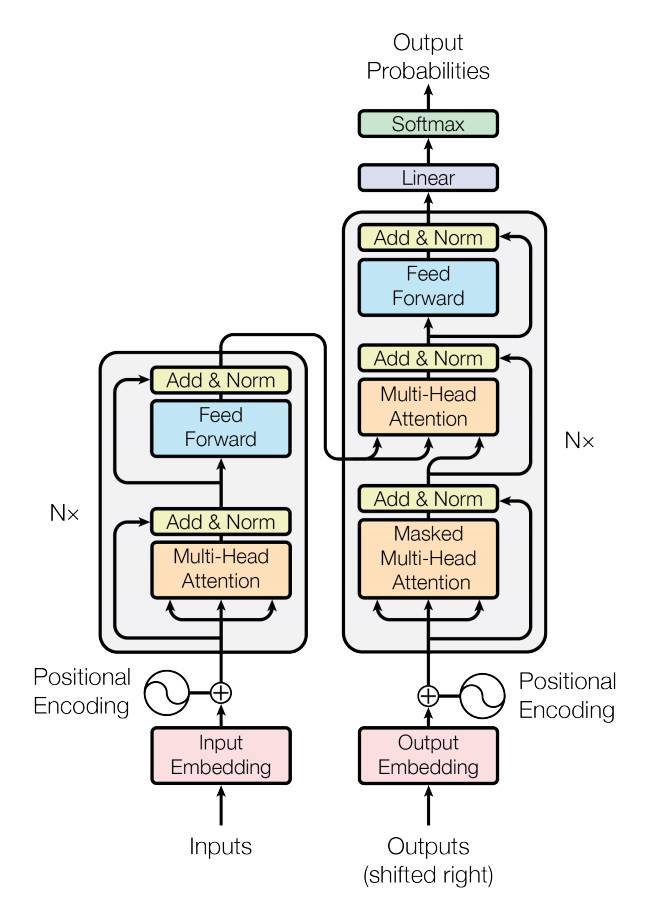
In this tutorial, we train a nn.TransformerEncoder model on a
language modeling task. Please note that this tutorial does not cover
the training of nn.TransformerDecoder, as depicted in
the right half of the diagram above. The language modeling task is to assign a
probability for the likelihood of a given word (or a sequence of words)
to follow a sequence of words. A sequence of tokens are passed to the embedding
layer first, followed by a positional encoding layer to account for the order
of the word (see the next paragraph for more details). The
nn.TransformerEncoder consists of multiple layers of
nn.TransformerEncoderLayer.
Along with the input sequence, a square attention mask is required because the
self-attention layers in nn.TransformerDecoder are only allowed to attend
the earlier positions in the sequence. For the language modeling task, any
tokens on the future positions should be masked. To produce a probability
distribution over output words, the output of the nn.TransformerEncoder
model is passed through a linear layer to output unnormalized logits.
The log-softmax function isn’t applied here due to the later use of
CrossEntropyLoss,
which requires the inputs to be unnormalized logits.
import math
import os
from tempfile import TemporaryDirectory
from typing import Tuple
import torch
from torch import nn, Tensor
from torch.nn import TransformerEncoder, TransformerEncoderLayer
from torch.utils.data import dataset
class TransformerModel(nn.Module):
def __init__(self, ntoken: int, d_model: int, nhead: int, d_hid: int,
nlayers: int, dropout: float = 0.5):
super().__init__()
self.model_type = 'Transformer'
self.pos_encoder = PositionalEncoding(d_model, dropout)
encoder_layers = TransformerEncoderLayer(d_model, nhead, d_hid, dropout)
self.transformer_encoder = TransformerEncoder(encoder_layers, nlayers)
self.embedding = nn.Embedding(ntoken, d_model)
self.d_model = d_model
self.linear = nn.Linear(d_model, ntoken)
self.init_weights()
def init_weights(self) -> None:
initrange = 0.1
self.embedding.weight.data.uniform_(-initrange, initrange)
self.linear.bias.data.zero_()
self.linear.weight.data.uniform_(-initrange, initrange)
def forward(self, src: Tensor, src_mask: Tensor = None) -> Tensor:
"""
Arguments:
src: Tensor, shape ``[seq_len, batch_size]``
src_mask: Tensor, shape ``[seq_len, seq_len]``
Returns:
output Tensor of shape ``[seq_len, batch_size, ntoken]``
"""
src = self.embedding(src) * math.sqrt(self.d_model)
src = self.pos_encoder(src)
output = self.transformer_encoder(src, src_mask)
output = self.linear(output)
return output
PositionalEncoding module injects some information about the
relative or absolute position of the tokens in the sequence. The
positional encodings have the same dimension as the embeddings so that
the two can be summed. Here, we use sine and cosine functions of
different frequencies.
class PositionalEncoding(nn.Module):
def __init__(self, d_model: int, dropout: float = 0.1, max_len: int = 5000):
super().__init__()
self.dropout = nn.Dropout(p=dropout)
position = torch.arange(max_len).unsqueeze(1)
div_term = torch.exp(torch.arange(0, d_model, 2) * (-math.log(10000.0) / d_model))
pe = torch.zeros(max_len, 1, d_model)
pe[:, 0, 0::2] = torch.sin(position * div_term)
pe[:, 0, 1::2] = torch.cos(position * div_term)
self.register_buffer('pe', pe)
def forward(self, x: Tensor) -> Tensor:
"""
Arguments:
x: Tensor, shape ``[seq_len, batch_size, embedding_dim]``
"""
x = x + self.pe[:x.size(0)]
return self.dropout(x)
Load and batch data¶
This tutorial uses torchtext to generate Wikitext-2 dataset.
To access torchtext datasets, please install torchdata following instructions at https://github.com/pytorch/data.
%%
%%bash pip install portalocker pip install torchdata
The vocab object is built based on the train dataset and is used to numericalize tokens into tensors. Wikitext-2 represents rare tokens as <unk>.
Given a 1-D vector of sequential data, batchify() arranges the data
into batch_size columns. If the data does not divide evenly into
batch_size columns, then the data is trimmed to fit. For instance, with
the alphabet as the data (total length of 26) and batch_size=4, we would
divide the alphabet into sequences of length 6, resulting in 4 of such sequences.
Batching enables more parallelizable processing. However, batching means that
the model treats each column independently; for example, the dependence of
G and F can not be learned in the example above.
from torchtext.datasets import WikiText2
from torchtext.data.utils import get_tokenizer
from torchtext.vocab import build_vocab_from_iterator
train_iter = WikiText2(split='train')
tokenizer = get_tokenizer('basic_english')
vocab = build_vocab_from_iterator(map(tokenizer, train_iter), specials=['<unk>'])
vocab.set_default_index(vocab['<unk>'])
def data_process(raw_text_iter: dataset.IterableDataset) -> Tensor:
"""Converts raw text into a flat Tensor."""
data = [torch.tensor(vocab(tokenizer(item)), dtype=torch.long) for item in raw_text_iter]
return torch.cat(tuple(filter(lambda t: t.numel() > 0, data)))
# ``train_iter`` was "consumed" by the process of building the vocab,
# so we have to create it again
train_iter, val_iter, test_iter = WikiText2()
train_data = data_process(train_iter)
val_data = data_process(val_iter)
test_data = data_process(test_iter)
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
def batchify(data: Tensor, bsz: int) -> Tensor:
"""Divides the data into ``bsz`` separate sequences, removing extra elements
that wouldn't cleanly fit.
Arguments:
data: Tensor, shape ``[N]``
bsz: int, batch size
Returns:
Tensor of shape ``[N // bsz, bsz]``
"""
seq_len = data.size(0) // bsz
data = data[:seq_len * bsz]
data = data.view(bsz, seq_len).t().contiguous()
return data.to(device)
batch_size = 20
eval_batch_size = 10
train_data = batchify(train_data, batch_size) # shape ``[seq_len, batch_size]``
val_data = batchify(val_data, eval_batch_size)
test_data = batchify(test_data, eval_batch_size)
Functions to generate input and target sequence¶
get_batch() generates a pair of input-target sequences for
the transformer model. It subdivides the source data into chunks of
length bptt. For the language modeling task, the model needs the
following words as Target. For example, with a bptt value of 2,
we’d get the following two Variables for i = 0:
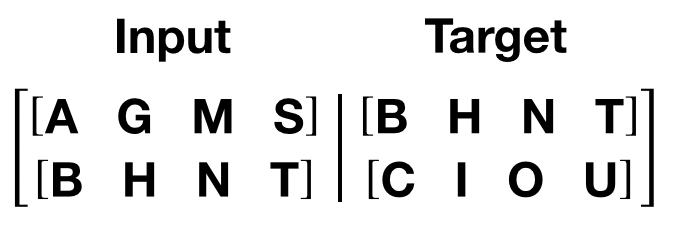
It should be noted that the chunks are along dimension 0, consistent
with the S dimension in the Transformer model. The batch dimension
N is along dimension 1.
bptt = 35
def get_batch(source: Tensor, i: int) -> Tuple[Tensor, Tensor]:
"""
Args:
source: Tensor, shape ``[full_seq_len, batch_size]``
i: int
Returns:
tuple (data, target), where data has shape ``[seq_len, batch_size]`` and
target has shape ``[seq_len * batch_size]``
"""
seq_len = min(bptt, len(source) - 1 - i)
data = source[i:i+seq_len]
target = source[i+1:i+1+seq_len].reshape(-1)
return data, target
Initiate an instance¶
The model hyperparameters are defined below. The vocab size is
equal to the length of the vocab object.
ntokens = len(vocab) # size of vocabulary
emsize = 200 # embedding dimension
d_hid = 200 # dimension of the feedforward network model in ``nn.TransformerEncoder``
nlayers = 2 # number of ``nn.TransformerEncoderLayer`` in ``nn.TransformerEncoder``
nhead = 2 # number of heads in ``nn.MultiheadAttention``
dropout = 0.2 # dropout probability
model = TransformerModel(ntokens, emsize, nhead, d_hid, nlayers, dropout).to(device)
Run the model¶
We use CrossEntropyLoss with the SGD (stochastic gradient descent) optimizer. The learning rate is initially set to 5.0 and follows a StepLR schedule. During training, we use nn.utils.clip_grad_norm_ to prevent gradients from exploding.
import time
criterion = nn.CrossEntropyLoss()
lr = 5.0 # learning rate
optimizer = torch.optim.SGD(model.parameters(), lr=lr)
scheduler = torch.optim.lr_scheduler.StepLR(optimizer, 1.0, gamma=0.95)
def train(model: nn.Module) -> None:
model.train() # turn on train mode
total_loss = 0.
log_interval = 200
start_time = time.time()
num_batches = len(train_data) // bptt
for batch, i in enumerate(range(0, train_data.size(0) - 1, bptt)):
data, targets = get_batch(train_data, i)
output = model(data)
output_flat = output.view(-1, ntokens)
loss = criterion(output_flat, targets)
optimizer.zero_grad()
loss.backward()
torch.nn.utils.clip_grad_norm_(model.parameters(), 0.5)
optimizer.step()
total_loss += loss.item()
if batch % log_interval == 0 and batch > 0:
lr = scheduler.get_last_lr()[0]
ms_per_batch = (time.time() - start_time) * 1000 / log_interval
cur_loss = total_loss / log_interval
ppl = math.exp(cur_loss)
print(f'| epoch {epoch:3d} | {batch:5d}/{num_batches:5d} batches | '
f'lr {lr:02.2f} | ms/batch {ms_per_batch:5.2f} | '
f'loss {cur_loss:5.2f} | ppl {ppl:8.2f}')
total_loss = 0
start_time = time.time()
def evaluate(model: nn.Module, eval_data: Tensor) -> float:
model.eval() # turn on evaluation mode
total_loss = 0.
with torch.no_grad():
for i in range(0, eval_data.size(0) - 1, bptt):
data, targets = get_batch(eval_data, i)
seq_len = data.size(0)
output = model(data)
output_flat = output.view(-1, ntokens)
total_loss += seq_len * criterion(output_flat, targets).item()
return total_loss / (len(eval_data) - 1)
Loop over epochs. Save the model if the validation loss is the best we’ve seen so far. Adjust the learning rate after each epoch.
best_val_loss = float('inf')
epochs = 3
with TemporaryDirectory() as tempdir:
best_model_params_path = os.path.join(tempdir, "best_model_params.pt")
for epoch in range(1, epochs + 1):
epoch_start_time = time.time()
train(model)
val_loss = evaluate(model, val_data)
val_ppl = math.exp(val_loss)
elapsed = time.time() - epoch_start_time
print('-' * 89)
print(f'| end of epoch {epoch:3d} | time: {elapsed:5.2f}s | '
f'valid loss {val_loss:5.2f} | valid ppl {val_ppl:8.2f}')
print('-' * 89)
if val_loss < best_val_loss:
best_val_loss = val_loss
torch.save(model.state_dict(), best_model_params_path)
scheduler.step()
model.load_state_dict(torch.load(best_model_params_path)) # load best model states
Evaluate the best model on the test dataset¶
test_loss = evaluate(model, test_data)
test_ppl = math.exp(test_loss)
print('=' * 89)
print(f'| End of training | test loss {test_loss:5.2f} | '
f'test ppl {test_ppl:8.2f}')
print('=' * 89)
Total running time of the script: ( 0 minutes 0.000 seconds)
