


Note
Click here to download the full example code
Single-Machine Model Parallel Best Practices¶
Author: Shen Li
Model parallel is widely-used in distributed training
techniques. Previous posts have explained how to use
DataParallel
to train a neural network on multiple GPUs; this feature replicates the
same model to all GPUs, where each GPU consumes a different partition of the
input data. Although it can significantly accelerate the training process, it
does not work for some use cases where the model is too large to fit into a
single GPU. This post shows how to solve that problem by using model parallel,
which, in contrast to DataParallel, splits a single model onto different GPUs,
rather than replicating the entire model on each GPU (to be concrete, say a model
m contains 10 layers: when using DataParallel, each GPU will have a
replica of each of these 10 layers, whereas when using model parallel on two GPUs,
each GPU could host 5 layers).
The high-level idea of model parallel is to place different sub-networks of a
model onto different devices, and implement the forward method accordingly
to move intermediate outputs across devices. As only part of a model operates
on any individual device, a set of devices can collectively serve a larger
model. In this post, we will not try to construct huge models and squeeze them
into a limited number of GPUs. Instead, this post focuses on showing the idea
of model parallel. It is up to the readers to apply the ideas to real-world
applications.
Note
For distributed model parallel training where a model spans multiple servers, please refer to Getting Started With Distributed RPC Framework for examples and details.
Basic Usage¶
Let us start with a toy model that contains two linear layers. To run this model on two GPUs, simply put each linear layer on a different GPU, and move inputs and intermediate outputs to match the layer devices accordingly.
import torch
import torch.nn as nn
import torch.optim as optim
class ToyModel(nn.Module):
def __init__(self):
super(ToyModel, self).__init__()
self.net1 = torch.nn.Linear(10, 10).to('cuda:0')
self.relu = torch.nn.ReLU()
self.net2 = torch.nn.Linear(10, 5).to('cuda:1')
def forward(self, x):
x = self.relu(self.net1(x.to('cuda:0')))
return self.net2(x.to('cuda:1'))
Note that, the above ToyModel looks very similar to how one would
implement it on a single GPU, except the four to(device) calls which
place linear layers and tensors on proper devices. That is the only place in
the model that requires changes. The backward() and torch.optim will
automatically take care of gradients as if the model is on one GPU. You only
need to make sure that the labels are on the same device as the outputs when
calling the loss function.
model = ToyModel()
loss_fn = nn.MSELoss()
optimizer = optim.SGD(model.parameters(), lr=0.001)
optimizer.zero_grad()
outputs = model(torch.randn(20, 10))
labels = torch.randn(20, 5).to('cuda:1')
loss_fn(outputs, labels).backward()
optimizer.step()
Apply Model Parallel to Existing Modules¶
It is also possible to run an existing single-GPU module on multiple GPUs
with just a few lines of changes. The code below shows how to decompose
torchvision.models.resnet50() to two GPUs. The idea is to inherit from
the existing ResNet module, and split the layers to two GPUs during
construction. Then, override the forward method to stitch two
sub-networks by moving the intermediate outputs accordingly.
from torchvision.models.resnet import ResNet, Bottleneck
num_classes = 1000
class ModelParallelResNet50(ResNet):
def __init__(self, *args, **kwargs):
super(ModelParallelResNet50, self).__init__(
Bottleneck, [3, 4, 6, 3], num_classes=num_classes, *args, **kwargs)
self.seq1 = nn.Sequential(
self.conv1,
self.bn1,
self.relu,
self.maxpool,
self.layer1,
self.layer2
).to('cuda:0')
self.seq2 = nn.Sequential(
self.layer3,
self.layer4,
self.avgpool,
).to('cuda:1')
self.fc.to('cuda:1')
def forward(self, x):
x = self.seq2(self.seq1(x).to('cuda:1'))
return self.fc(x.view(x.size(0), -1))
The above implementation solves the problem for cases where the model is too
large to fit into a single GPU. However, you might have already noticed that
it will be slower than running it on a single GPU if your model fits. It is
because, at any point in time, only one of the two GPUs are working, while
the other one is sitting there doing nothing. The performance further
deteriorates as the intermediate outputs need to be copied from cuda:0 to
cuda:1 between layer2 and layer3.
Let us run an experiment to get a more quantitative view of the execution
time. In this experiment, we train ModelParallelResNet50 and the existing
torchvision.models.resnet50() by running random inputs and labels through
them. After the training, the models will not produce any useful predictions,
but we can get a reasonable understanding of the execution times.
import torchvision.models as models
num_batches = 3
batch_size = 120
image_w = 128
image_h = 128
def train(model):
model.train(True)
loss_fn = nn.MSELoss()
optimizer = optim.SGD(model.parameters(), lr=0.001)
one_hot_indices = torch.LongTensor(batch_size) \
.random_(0, num_classes) \
.view(batch_size, 1)
for _ in range(num_batches):
# generate random inputs and labels
inputs = torch.randn(batch_size, 3, image_w, image_h)
labels = torch.zeros(batch_size, num_classes) \
.scatter_(1, one_hot_indices, 1)
# run forward pass
optimizer.zero_grad()
outputs = model(inputs.to('cuda:0'))
# run backward pass
labels = labels.to(outputs.device)
loss_fn(outputs, labels).backward()
optimizer.step()
The train(model) method above uses nn.MSELoss as the loss function,
and optim.SGD as the optimizer. It mimics training on 128 X 128
images which are organized into 3 batches where each batch contains 120
images. Then, we use timeit to run the train(model) method 10 times
and plot the execution times with standard deviations.
import matplotlib.pyplot as plt
plt.switch_backend('Agg')
import numpy as np
import timeit
num_repeat = 10
stmt = "train(model)"
setup = "model = ModelParallelResNet50()"
mp_run_times = timeit.repeat(
stmt, setup, number=1, repeat=num_repeat, globals=globals())
mp_mean, mp_std = np.mean(mp_run_times), np.std(mp_run_times)
setup = "import torchvision.models as models;" + \
"model = models.resnet50(num_classes=num_classes).to('cuda:0')"
rn_run_times = timeit.repeat(
stmt, setup, number=1, repeat=num_repeat, globals=globals())
rn_mean, rn_std = np.mean(rn_run_times), np.std(rn_run_times)
def plot(means, stds, labels, fig_name):
fig, ax = plt.subplots()
ax.bar(np.arange(len(means)), means, yerr=stds,
align='center', alpha=0.5, ecolor='red', capsize=10, width=0.6)
ax.set_ylabel('ResNet50 Execution Time (Second)')
ax.set_xticks(np.arange(len(means)))
ax.set_xticklabels(labels)
ax.yaxis.grid(True)
plt.tight_layout()
plt.savefig(fig_name)
plt.close(fig)
plot([mp_mean, rn_mean],
[mp_std, rn_std],
['Model Parallel', 'Single GPU'],
'mp_vs_rn.png')
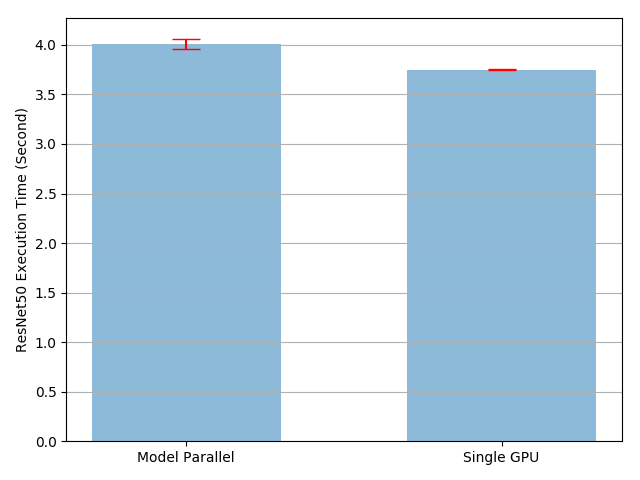
The result shows that the execution time of model parallel implementation is
4.02/3.75-1=7% longer than the existing single-GPU implementation. So we
can conclude there is roughly 7% overhead in copying tensors back and forth
across the GPUs. There are rooms for improvements, as we know one of the two
GPUs is sitting idle throughout the execution. One option is to further
divide each batch into a pipeline of splits, such that when one split reaches
the second sub-network, the following split can be fed into the first
sub-network. In this way, two consecutive splits can run concurrently on two
GPUs.
Speed Up by Pipelining Inputs¶
In the following experiments, we further divide each 120-image batch into 20-image splits. As PyTorch launches CUDA operations asynchronously, the implementation does not need to spawn multiple threads to achieve concurrency.
class PipelineParallelResNet50(ModelParallelResNet50):
def __init__(self, split_size=20, *args, **kwargs):
super(PipelineParallelResNet50, self).__init__(*args, **kwargs)
self.split_size = split_size
def forward(self, x):
splits = iter(x.split(self.split_size, dim=0))
s_next = next(splits)
s_prev = self.seq1(s_next).to('cuda:1')
ret = []
for s_next in splits:
# A. ``s_prev`` runs on ``cuda:1``
s_prev = self.seq2(s_prev)
ret.append(self.fc(s_prev.view(s_prev.size(0), -1)))
# B. ``s_next`` runs on ``cuda:0``, which can run concurrently with A
s_prev = self.seq1(s_next).to('cuda:1')
s_prev = self.seq2(s_prev)
ret.append(self.fc(s_prev.view(s_prev.size(0), -1)))
return torch.cat(ret)
setup = "model = PipelineParallelResNet50()"
pp_run_times = timeit.repeat(
stmt, setup, number=1, repeat=num_repeat, globals=globals())
pp_mean, pp_std = np.mean(pp_run_times), np.std(pp_run_times)
plot([mp_mean, rn_mean, pp_mean],
[mp_std, rn_std, pp_std],
['Model Parallel', 'Single GPU', 'Pipelining Model Parallel'],
'mp_vs_rn_vs_pp.png')
Please note, device-to-device tensor copy operations are synchronized on current streams on the source and the destination devices. If you create multiple streams, you have to make sure that copy operations are properly synchronized. Writing the source tensor or reading/writing the destination tensor before finishing the copy operation can lead to undefined behavior. The above implementation only uses default streams on both source and destination devices, hence it is not necessary to enforce additional synchronizations.
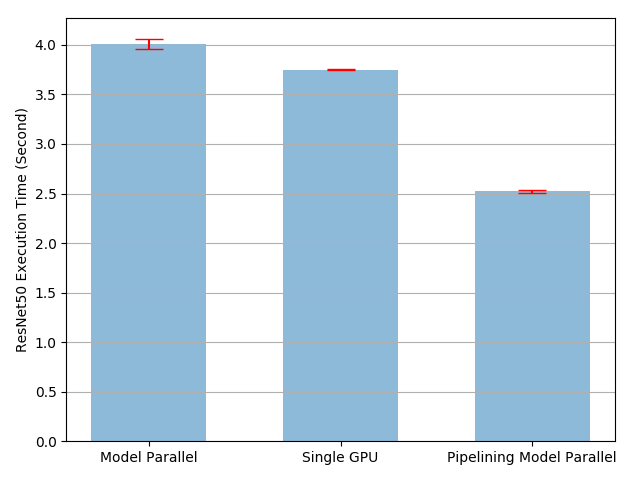
The experiment result shows that, pipelining inputs to model parallel
ResNet50 speeds up the training process by roughly 3.75/2.51-1=49%. It is
still quite far away from the ideal 100% speedup. As we have introduced a new
parameter split_sizes in our pipeline parallel implementation, it is
unclear how the new parameter affects the overall training time. Intuitively
speaking, using small split_size leads to many tiny CUDA kernel launch,
while using large split_size results to relatively long idle times during
the first and last splits. Neither are optimal. There might be an optimal
split_size configuration for this specific experiment. Let us try to find
it by running experiments using several different split_size values.
means = []
stds = []
split_sizes = [1, 3, 5, 8, 10, 12, 20, 40, 60]
for split_size in split_sizes:
setup = "model = PipelineParallelResNet50(split_size=%d)" % split_size
pp_run_times = timeit.repeat(
stmt, setup, number=1, repeat=num_repeat, globals=globals())
means.append(np.mean(pp_run_times))
stds.append(np.std(pp_run_times))
fig, ax = plt.subplots()
ax.plot(split_sizes, means)
ax.errorbar(split_sizes, means, yerr=stds, ecolor='red', fmt='ro')
ax.set_ylabel('ResNet50 Execution Time (Second)')
ax.set_xlabel('Pipeline Split Size')
ax.set_xticks(split_sizes)
ax.yaxis.grid(True)
plt.tight_layout()
plt.savefig("split_size_tradeoff.png")
plt.close(fig)
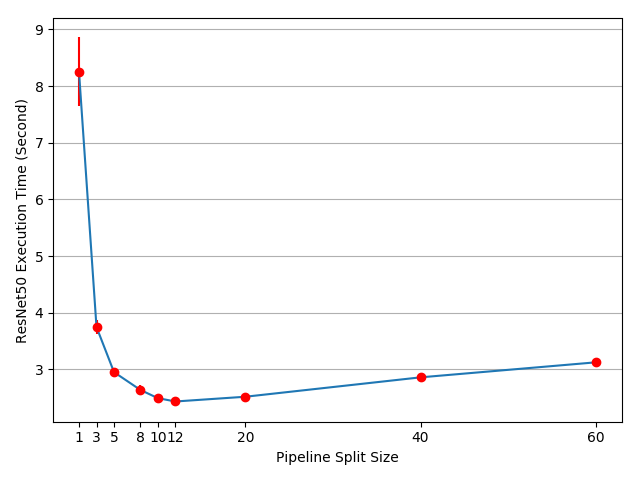
The result shows that setting split_size to 12 achieves the fastest
training speed, which leads to 3.75/2.43-1=54% speedup. There are
still opportunities to further accelerate the training process. For example,
all operations on cuda:0 is placed on its default stream. It means that
computations on the next split cannot overlap with the copy operation of the
prev split. However, as prev and next splits are different tensors, there is
no problem to overlap one’s computation with the other one’s copy. The
implementation need to use multiple streams on both GPUs, and different
sub-network structures require different stream management strategies. As no
general multi-stream solution works for all model parallel use cases, we will
not discuss it in this tutorial.
Note:
This post shows several performance measurements. You might see different numbers when running the same code on your own machine, because the result depends on the underlying hardware and software. To get the best performance for your environment, a proper approach is to first generate the curve to figure out the best split size, and then use that split size to pipeline inputs.
Total running time of the script: ( 0 minutes 0.000 seconds)
